원문: StreamingClaw Technical Report (arXiv:2603.22120, 2026-03-23)
저자: MindGPT-ov Team, Li Auto Inc.
핵심 요약
- StreamingClaw = 실시간 스트리밍 비디오 이해 + 구현 지능을 위한 통합 에이전트 프레임워크
- OpenClaw 호환 → 오픈소스 커뮤니티 리소스 활용 가능
- 5가지 핵심 기능: 실시간 스트리밍 추론, 미래 예측 및 프로액티브 상호작용, 멀티모달 장기 메모리, 지각-결정-행동 폐루프, OpenClaw 호환
문제: 실시간 스트리밍 비디오 이해의 3대 도전
1. 스트리밍 퍼셉션 (Streaming Perception)
실제 환경은 비정상적(non-stationary)이고 지속적으로 진화한다. 사람, 물체, 장면이 동적으로 움직인다. 오프라인 비디오처럼 전처리할 수 없다. 대신 증분적(incremental) 방식으로 환경 상태를 지각해야 한다.
2. 장기 메모리 (Long-term Memory)
스트리밍 입력은 물리적 환경의 연속적 시공간 표현이다. 장기 메모리 없이 제한된 프레임이나 짧은 클립만 사용하면 상호작용 능력과 작업 수행 신뢰성이 크게 저하된다.
3. 프로액티브 상호작용 (Proactive Interaction)
핵심 요구사항: 시각적 의미 정보를 실행 가능한 행동 명령으로 직접 변환. 수동적 지각을 넘어 능동적 지각으로 환경 정보를 획득해야 한다.
StreamingClaw 아키텍처
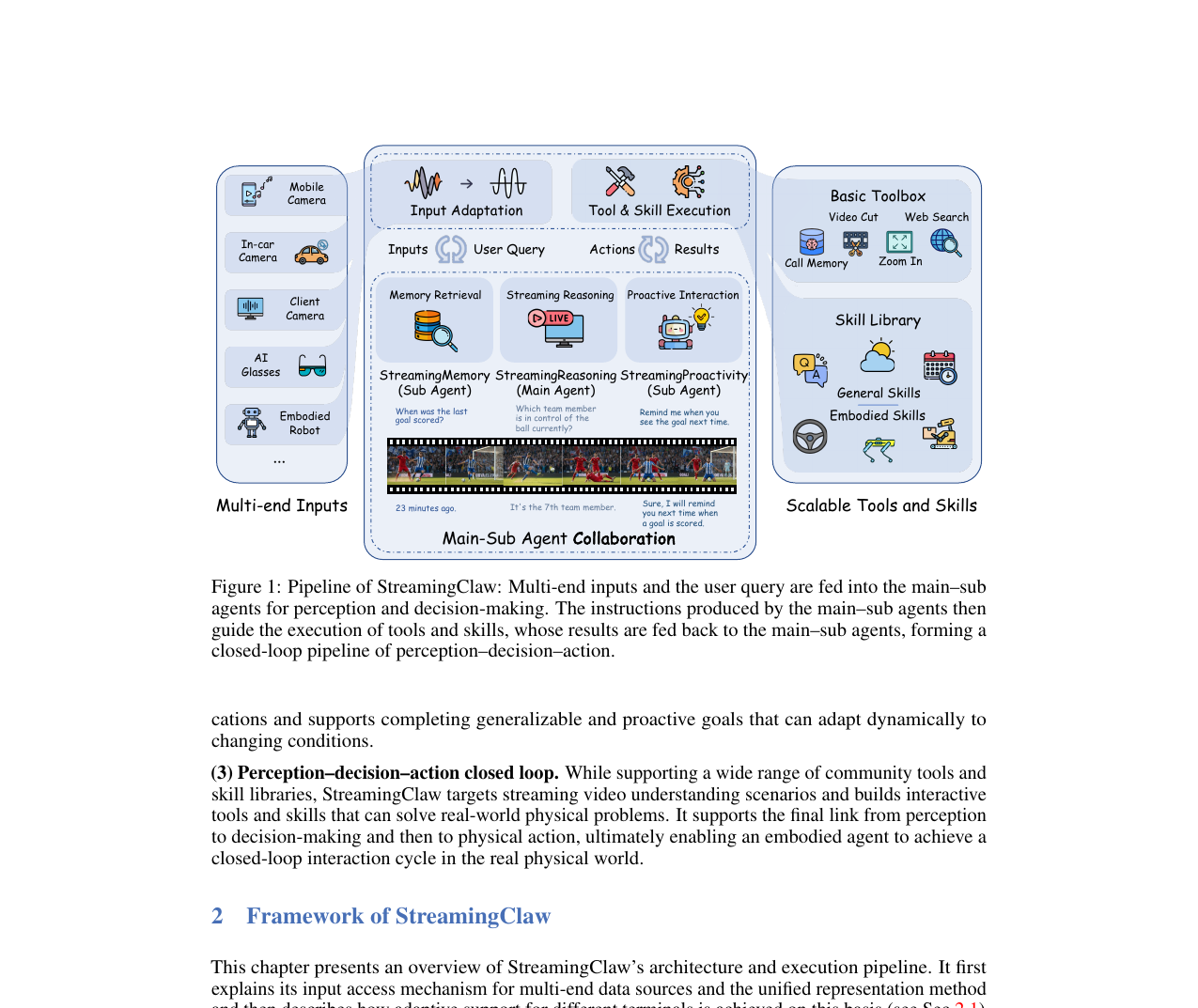
메인-서브 에이전트 협업 구조
| 에이전트 | 역할 |
|---|---|
| StreamingReasoning (메인) | 실시간 스트리밍 지각, 추론, 멀티태스킹 스케줄링 |
| StreamingMemory (서브) | 멀티모달 장기 메모리 저장, 계층적 진화, 효율적 검색 |
| StreamingProactivity (서브) | 프로액티브 상호작용 결정 |
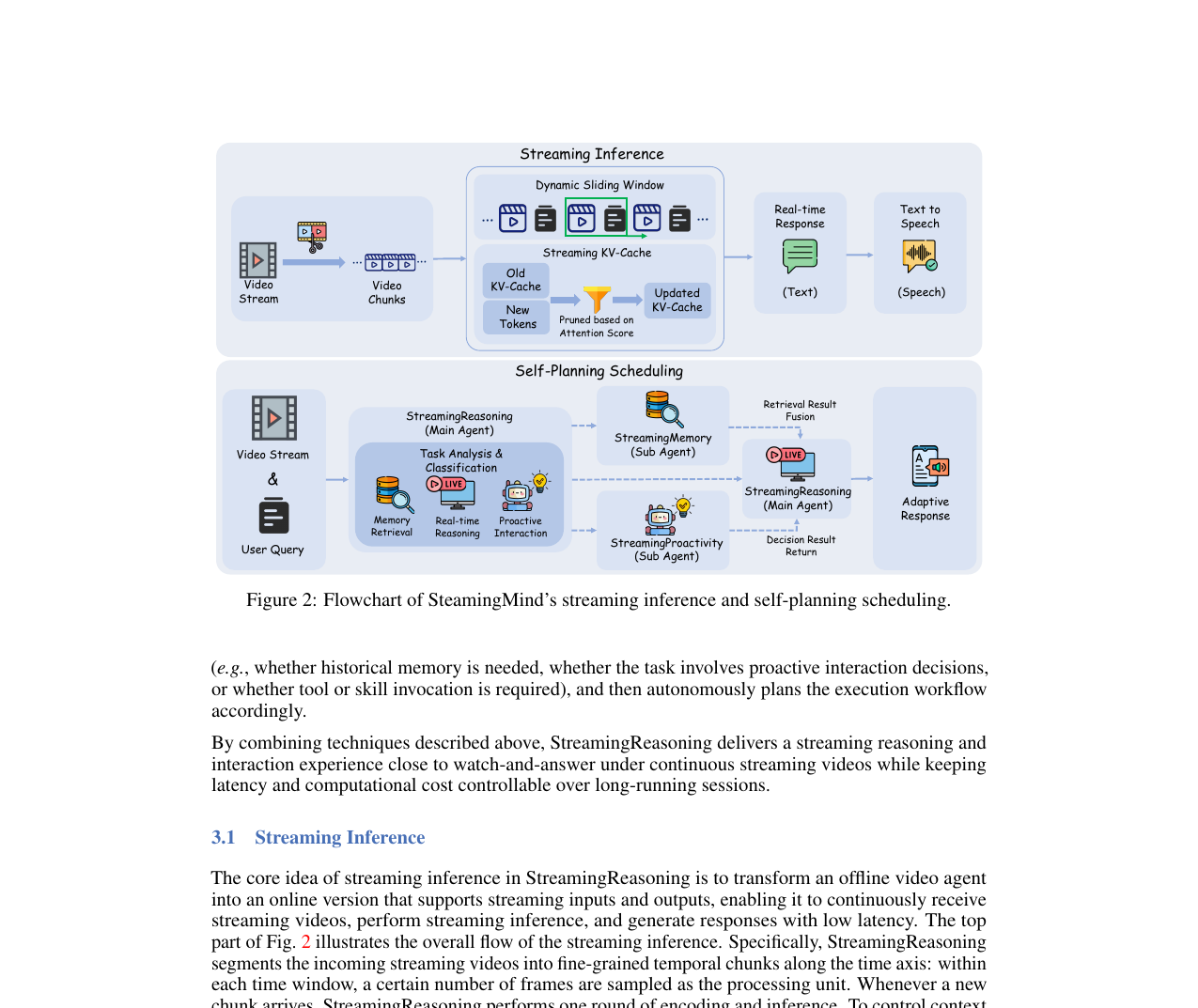
1. StreamingReasoning: 실시간 스트리밍 추론
스트리밍 추론 메커니즘
오프라인 비디오 에이전트 → 온라인 스트리밍 버전으로 변환:
- 동적 슬라이딩 윈도우: 시간 윈도우 내 시각/텍스트 컨텍스트만 유지
- 스트리밍 KV-Cache: 이전 단계 KV-Cache 재사용 → 증분 토큰만 계산
- 토큰 프루닝: 어텐션 점수 기반 저기여 시각 토큰 제거
3단계 KV-Cache 프루닝
Step 1: 첫 디코딩 → 시각 토큰 KV-Cache 저장 → 상위 p%만 유지
Step 2: 장면 변화 작으면 캐시 업데이트 스킵 (유사도 임계값 활용)
Step 3: 새 토큰 필요 시 → Step 1 반복
자기 계획 스케줄링 (Self-Planning Scheduling)
사용자 쿼리 → 작업 파싱/분류
↓
├─ 메모리 필요? → StreamingMemory 호출
├─ 프로액티브 필요? → StreamingProactivity 호출
└─ 둘 다 불필요? → 직접 스트리밍 추론
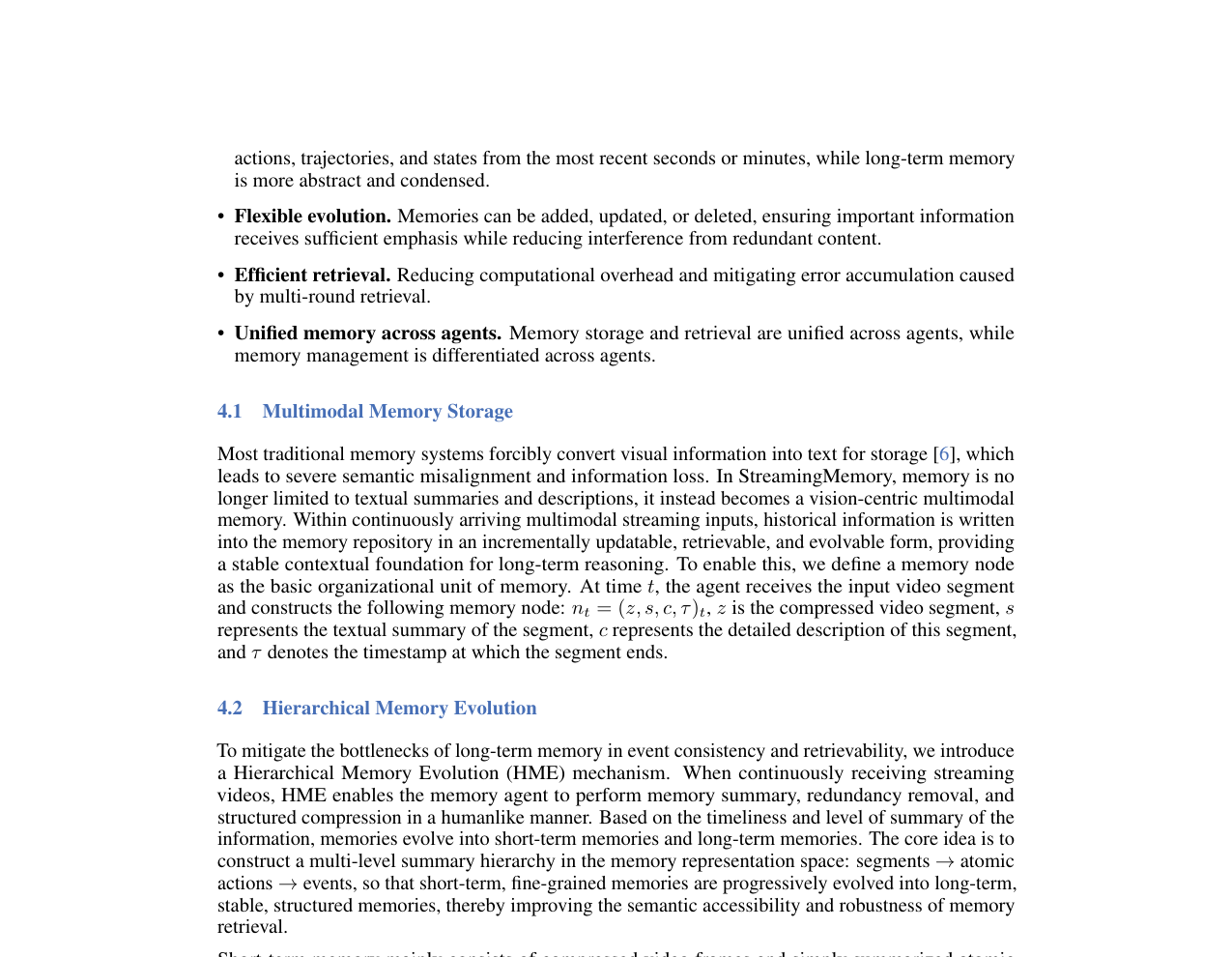
2. StreamingMemory: 멀티모달 장기 메모리
기존 메모리 시스템의 문제
| 문제 | 설명 |
|---|---|
| 정보 손실 | 텍스트만 저장 → 시각 정보 손실 |
| 비효율성 | 모든 메모리 컨텍스트 주입 → 토큰 낭비 |
| 경직성 | 메모리 조각화, 중요도 구분 없음 |
메모리 노드 정의
nt = (z, s, c, τ)t
z = 압축된 비디오 세그먼트
s = 텍스트 요약
c = 상세 설명
τ = 타임스탬프
계층적 메모리 진화 (HME)
세그먼트 → 원자적 행동(Atomic Action) → 이벤트(Event)
↓ ↓ ↓
단기 메모리 중간 단계 장기 메모리
3가지 효과:
- 시간적 쿼리 가능성: 원자적 행동 체인이 시간 순서 보존
- 중복 압축: 반복 세그먼트 → 이벤트로 통합
- 구조화된 장기 저장: 이벤트가 안정적인 메모리 청크
효율적 메모리 검색
- 명령 기반 검색: 질문 유형에 따라 검색 깊이/중단 기준 조정
- 고동시성 검색: 후보 매칭, 재순위, 증거 추출 병렬 처리
- 자기 주도 시간 순회: 정방향/역방향/현저성 우선 순회
3. StreamingProactivity: 프로액티브 상호작용
두 가지 시나리오
| 시나리오 | 예시 |
|---|---|
| 시간 인식 | ”5분 후 목적지까지 거리 알려줘” |
| 이벤트 그라운딩 | ”집에 도착하면 알려줘” |
작동 원리
- 의도 분해: 사용자 쿼리에서 프로액티브 의도 추출
- 일반화: 구체적 조건 → 일반화된 조건으로 변환
- 모니터링: 실시간 상태와 조건 매칭
- 트리거: 조건 충족 시 자동 응답
4. 도구와 스킬
기본 도구 (Basic Toolbox)
- 비디오 컷
- 웹 검색
- 메모리 호출
- 줌 인
스킬 라이브러리 (Skill Library)
| 일반 스킬 | 구현 스킬 |
|---|---|
| 일상/엔터테인먼트 | 물리적 환경 제어 |
| 정보 검색 | 센서 데이터 처리 |
| 커뮤니케이션 | 로봇 행동 실행 |
확장 가능한 구조
- OpenClaw 도구/스킬 생태계와 호환
- 스트리밍 비디오 시나리오에 특화된 도구 추가 가능
지각-결정-행동 폐루프
멀티엔드 입력 (모바일/차량/안경/로봇)
↓
입력 적응
↓
메모리 검색 ←→ StreamingReasoning ←→ 프로액티브 상호작용
↓ ↓ ↓
도구 & 스킬 실행 ←—— 액션 ——→ 결과
↓
물리 세계 제어
기술적 특징 요약
스트리밍 추론
| 기술 | 효과 |
|---|---|
| 동적 슬라이딩 윈도우 | 컨텍스트 길이 제어 |
| 스트리밍 KV-Cache | 저지연, 안정적 처리량 |
| 토큰 프루닝 | GPU 메모리 절감 |
메모리 시스템
| 기술 | 효과 |
|---|---|
| 멀티모달 저장 | 시각 정보 보존 |
| 계층적 진화 | 단기→장기 메모리 구조화 |
| 병렬 검색 | 효율적 메모리 접근 |
프로액티브 상호작용
| 기술 | 효과 |
|---|---|
| 의도 일반화 | 다양한 조건 처리 |
| 실시간 모니터링 | 적시 개입 |
| 다중 트리거 | 복합 조건 지원 |
적용 분야
- 자율주행: 실시간 도로 상황 인식 및 의사결정
- 스마트 콕핏: 운전자 상태 모니터링 및 프로액티브 지원
- 구현 로봇: 실시간 환경 인식 및 작업 수행
- AI 안경: 웨어러블 실시간 어시스턴트
- 홈 IoT: 스마트홈 제어 및 모니터링
OpenClaw 호환성
StreamingClaw는 OpenClaw 프레임워크와 호환되도록 설계되었다:
- 정적 텍스트 기반 상호작용에 특화된 OpenClaw
- StreamingClaw는 실시간 스트리밍 및 동적 변화 시나리오에 특화
- 두 프레임워크의 기능을 결합하여 더 광범위한 설정에 적용 가능
결론
StreamingClaw는 실시간 스트리밍 비디오 이해를 위한 통합 에이전트 프레임워크다:
- 실시간: 저지연 스트리밍 추론
- 멀티모달 장기 메모리: 시각 중심 메모리 저장 및 검색
- 프로액티브: 사용자 개입 없이 자동 응답
- 폐루프: 지각→결정→행동 완결
- 확장 가능: OpenClaw 생태계 활용
프로젝트 페이지: StreamingClaw
논문: arXiv:2603.22120