Q. 최근 “에이전트가 알아서 잘 추론하겠지”라는 접근에 문제가 있다고 들었는데, 어떤 점이 비효율적인 건가요?
현재 대부분의 에이전트 LLM은 chain-of-thought를 그냥 길게 늘리는 방식으로 추론합니다. 훈련 과정에서 추론 길이가 급격히 증가하는데, 이게 정확도 향상으로 이어지지 않는 경우가 많아요. 토큰을 엄청나게 쓰면서도 성능은 답보 상태인 거죠.
근본적인 원인은 계획(planning)을 제어하는 메커니즘이 없다는 겁니다. 모델이 언제 계획을 세워야 하는지, 얼마나 깊게 계획해야 하는지, 아니면 계획 없이 바로 행동해도 되는지를 스스로 판단하지 못합니다. 그냥 무조건 긴 사고를 출력하도록 훈련되는 거예요.
Q. 그럼 이 논문에서 제안하는 해결책은 뭔가요?
Carnegie Mellon University 연구진이 **SR²AM(Self-Regulated Simulative Reasoning Agentic LLM)**이라는 프레임워크를 제안했습니다. 핵심 아이디어는 에이전트의 의사결정을 세 가지 시스템으로 분해하는 거예요.
- System I (반응적 실행): 정밀한 추론과 직접적인 행동. 빠르고 효율적인 처리
- System II (시뮬레이션 추론): 세계 모델을 사용해 행동의 결과를 예측하며 계획을 수립
- System III (자기 조절): 언제, 얼마나 깊게 계획할지 결정하는 설정기(configurator)
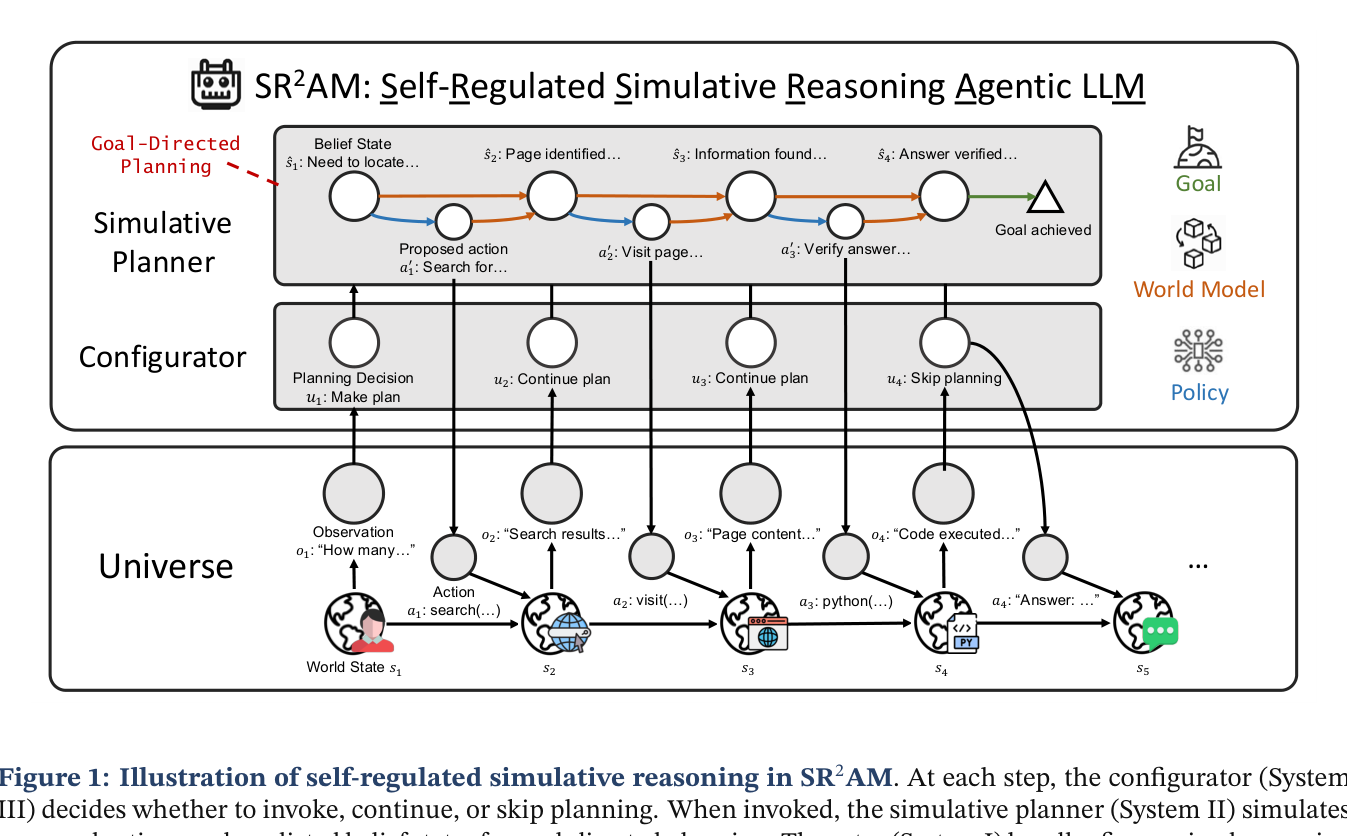
이 세 시스템이 상호작용하면서, 에이전트가 상황에 따라 계획을 세우거나 건너뛰거나 기존 계획을 이어가는 식으로 유연하게 대응합니다.
Q. “시뮬레이션 추론”이라는 게 구체적으로 어떤 건가요?
에이전트가 실제로 행동하기 전에, 후보 행동들을 제안하고 각각의 결과를 세계 모델(world model)을 통해 예측합니다. 그중에서 목표 달성에 가장 유리한 행동 순서를 선택하는 거죠.
일반적인 chain-of-thought와의 차이는 구조에 있어요. 시뮬레이션 추론은 현재 상태, 제안된 행동, 예측된 미래 상태를 명시적으로 표현합니다. 이렇게 하면 계획의 진행 상황을 추적하고, 예측이 빗나간 걸 감지할 수 있어요. 반면 무차별적인 사고 과장(unconstrained CoT)은 이런 구조가 없어서 계획이 암묵적으로만 드러납니다.
Q. “자기 조절”은 어떻게 작동하나요?
각 턴마다 설정기(configurator)가 현재 상태를 평가해서 세 가지 결정 중 하나를 내립니다:
- 새 계획 수립 — 상황이 복잡하거나 불확실할 때
- 기존 계획 계속 — 계획대로 진행 중일 때
- 계획 건너뛰기 — 단순한 작업이나 긴급한 상황일 때
이게 핵심입니다. 모든 상황에서 무조건 계획을 세우는 게 아니라, 필요할 때만 계획을 호출하는 거예요. 이렇게 하면 불필요한 토큰 소모를 크게 줄일 수 있습니다.
Q. 실험 결과는 어떤가요?
4개 분야(수학, 과학, 표 데이터 분석, 웹 정보 탐색) 11개 벤치마크에서 평가했습니다.
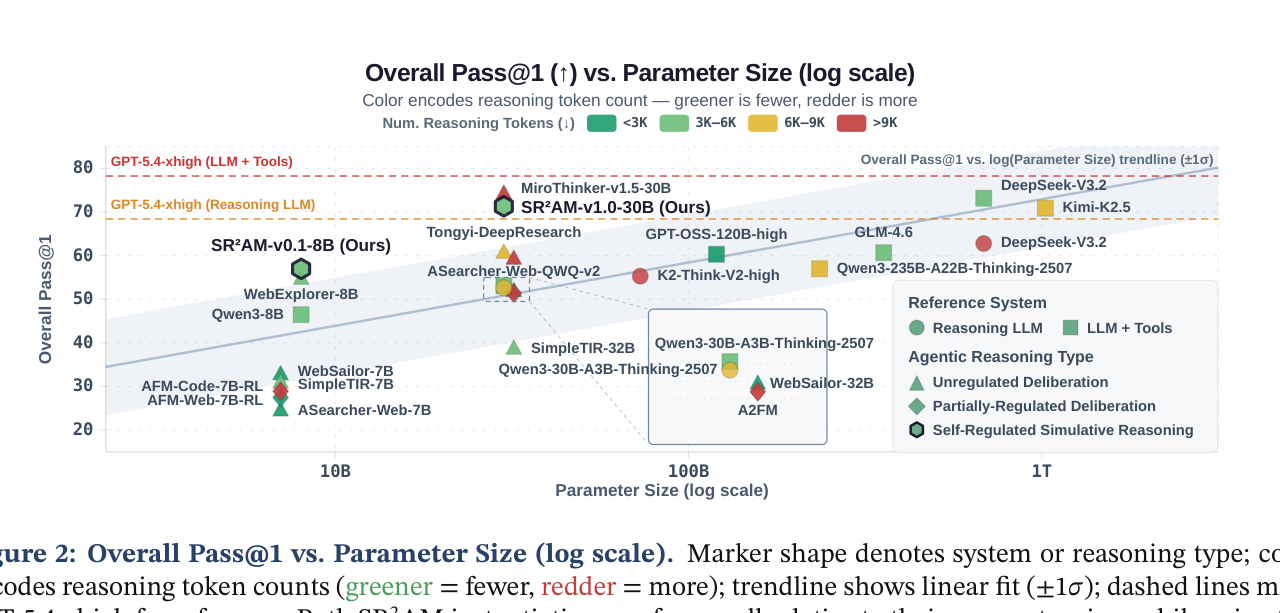
SR²AM-v0.1-8B는 8B 파라미터 모델인데, 120–355B 급 시스템과 견줄 만한 정확도를 달성했습니다. SR²AM-v1.0-30B는 685B~1T 급 모델들과 경쟁하는 성능을 보여줬어요.
더 중요한 건 효율성입니다. SR²AM-v1.0-30B는 비슷한 규모의 다른 에이전트 LLM 대비 25.8–95.3% 적은 추론 토큰을 사용했습니다. MiroThinker-v1.5-30B와 비교하면 정확도는 비슷한데 토큰은 51.2% 적게 썼어요.
Q. 강화학습을 거치면 어떻게 달라지나요?
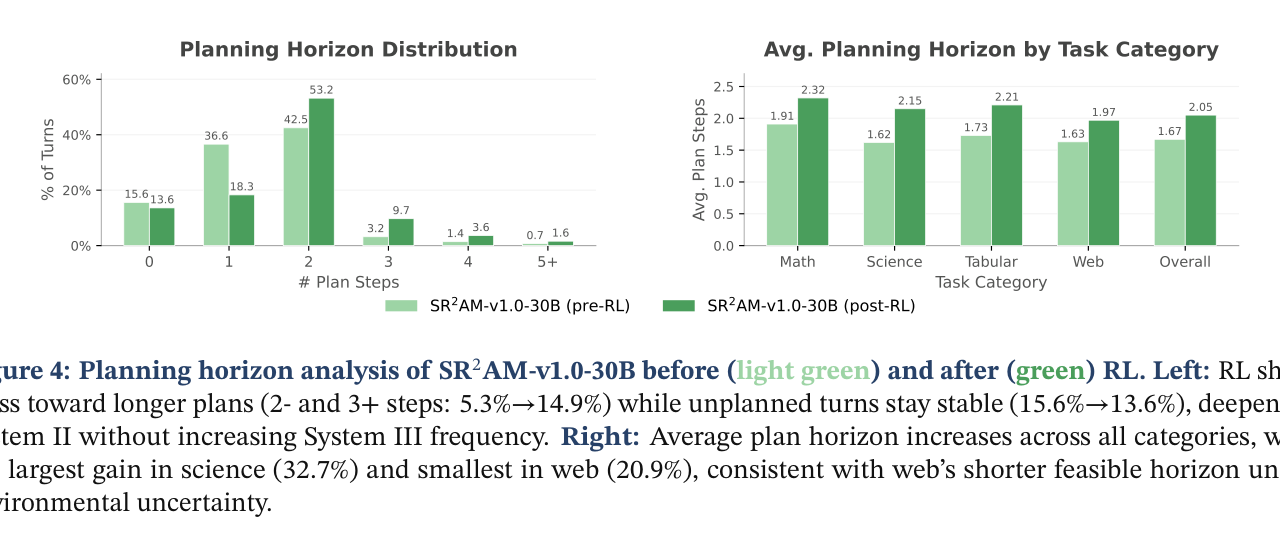
흥미로운 발견이 있었어요. RL을 거친 후 계획 빈도는 거의 안 변했는데, 계획 수평(horizon)은 평균 22.8% 증가했습니다. 즉, 모델이 “더 자주” 계획하는 게 아니라 “더 깊게” 계획하는 법을 배운 거예요.
이건 중요한 통찰입니다. 비조절 모델은 RL을 거치면 토큰 소모가 폭발하는데, SR²AM은 계획의 질을 높이는 방향으로 개선되어 토큰 증가가 제한적이었습니다.
Q. 데이터는 어떻게 구축하나요?
두 가지 방식을 실험했습니다.
v0.1 방식은 설정기와 플래너를 별도의 프롬프트 기반 LLM 모듈로 구현해서 궤적을 기록합니다. 다중 모듈 시스템에서 결정을 수집하는 거죠.
v1.0 방식은 기존에 학습된 추론 LLM(DeepSeek-V3.2)의 사고 궤적에서 구조화된 계획을 **복원(reconstruct)**합니다. 어노테이터 LLM이 각 스텝에서 계획이 필요한지 판단하고, 필요하면 상태-행동-미래상태 구조의 계획을 추출해요. 기존 추론 내용은 그대로 보존하면서 구조화된 계획 레이어를 추가하는 방식입니다.
v1.0 방식이 더 확장성이 좋아서, 다양한 선생 모델의 추론 궤적을 활용할 수 있습니다.
Q. 이 연구의 의의는 뭘로 보시나요?
에이전트 설계의 근본적인 전제를 바꾸는 연구라고 생각합니다. 지금까지는 “충분한 데이터와 컴퓨트를 주면 계획이 알아서 나타나겠지”라는 접근이 지배적이었어요. 이 논문은 계획을 명시적으로 모델링하고 조절하는 구조를 넣어야 한다는 걸 실험적으로 보여줍니다.
특히 “더 길게 생각한다고 더 나은 게 아니다”라는 점을 정량적으로 입증한 게 의미 있어요. SR²AM의 설정기 개념은 추론 시점의 계획뿐만 아니라, 에이전트가 스스로 학습하고 적응하는 방식까지 조절하는 더 넓은 원칙으로 확장될 수 있다고 저자들은 말합니다. 자율성의 새로운 차원을 여는 연구라고 할 수 있겠네요.
참고 논문: Deng, M. et al., “Efficient Agentic Reasoning Through Self-Regulated Simulative Planning”, arXiv:2605.22138, 2026. 코드 저장소